




WIKI: https://www.cnc.house/firmware-update-manual-for-the-upan-stepper-motor-controller
UPAN powerful features
Versatile motor control:
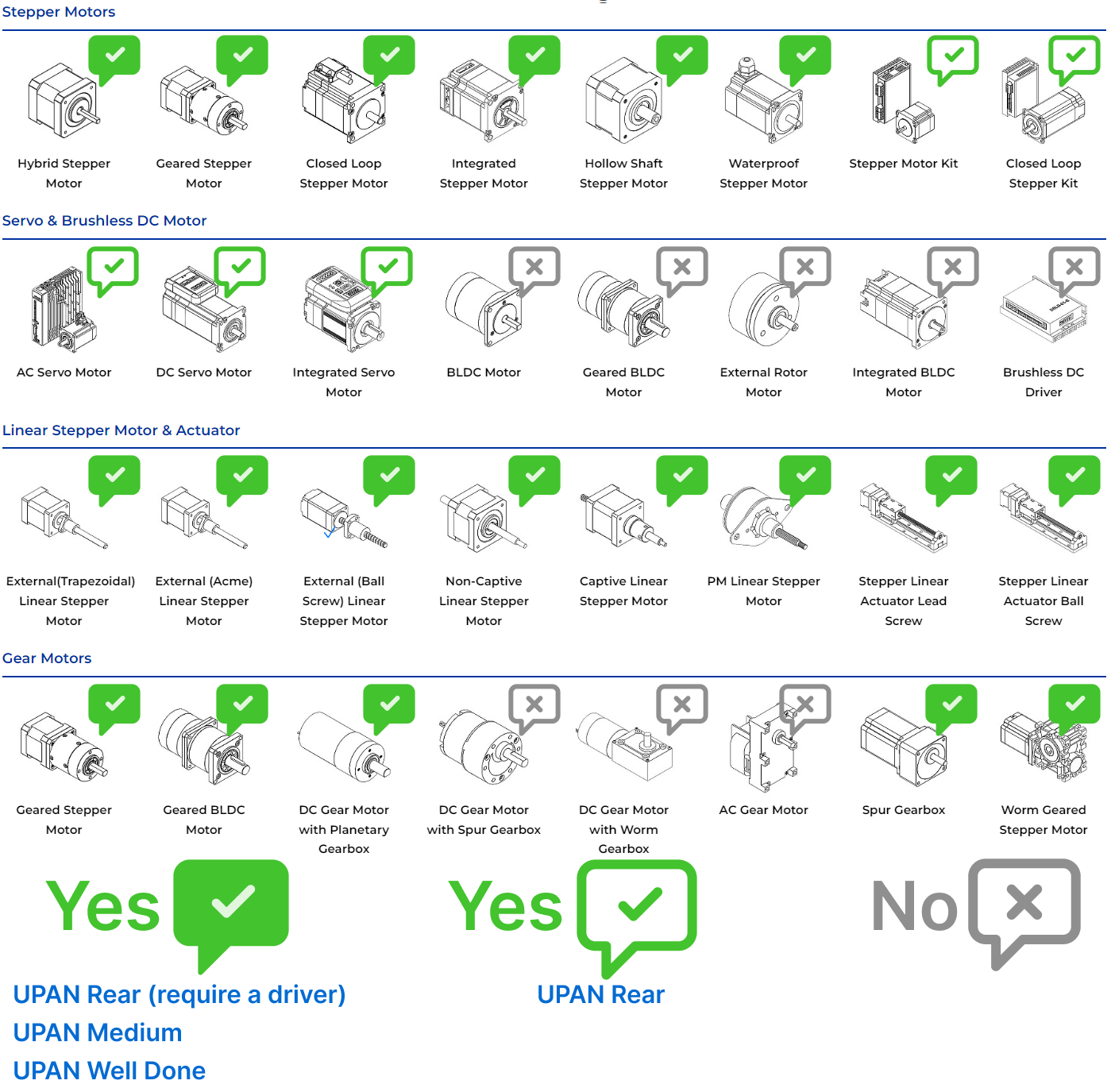
The Axis Controller UPAN is designed to control a wide range of stepper motors, from small ones used in 3D printers to large industrial servomotors.
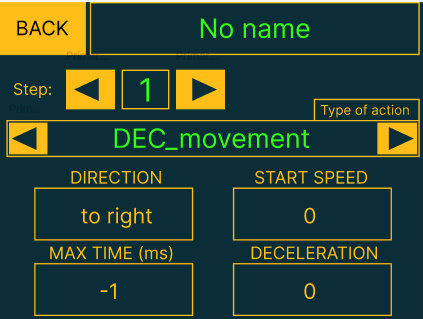
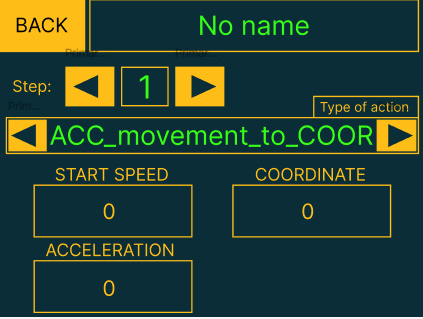
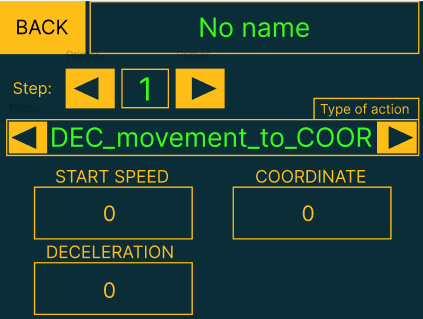
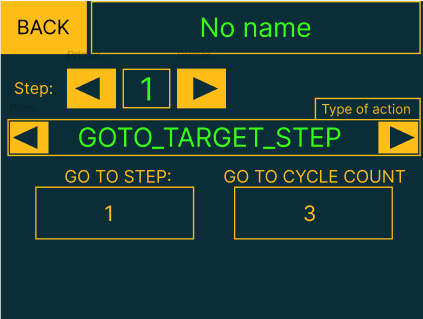
User-friendly touchscreen interface:
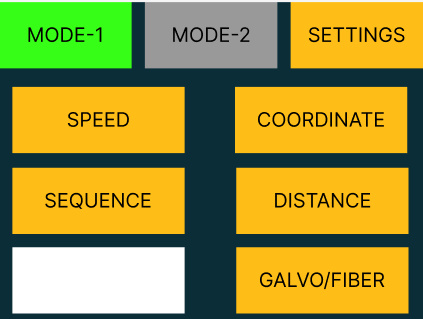
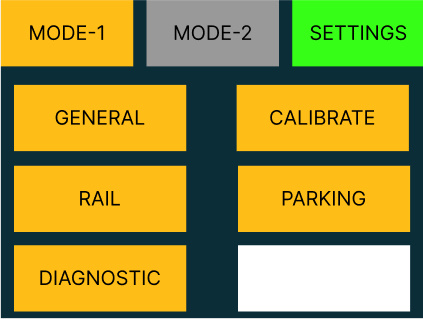
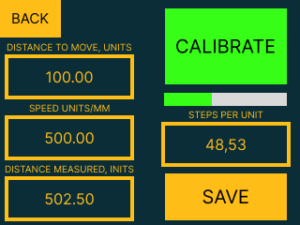
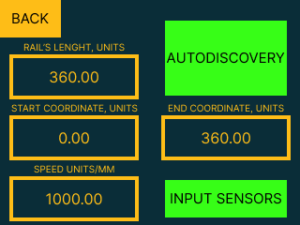
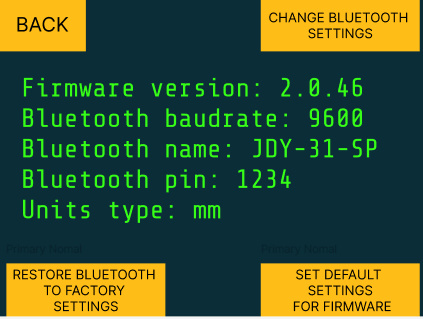
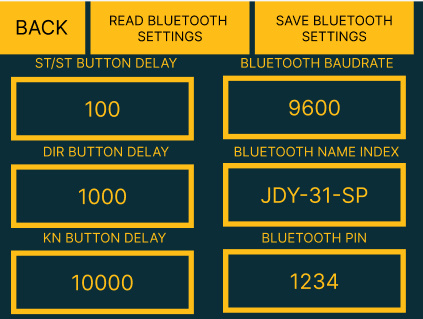
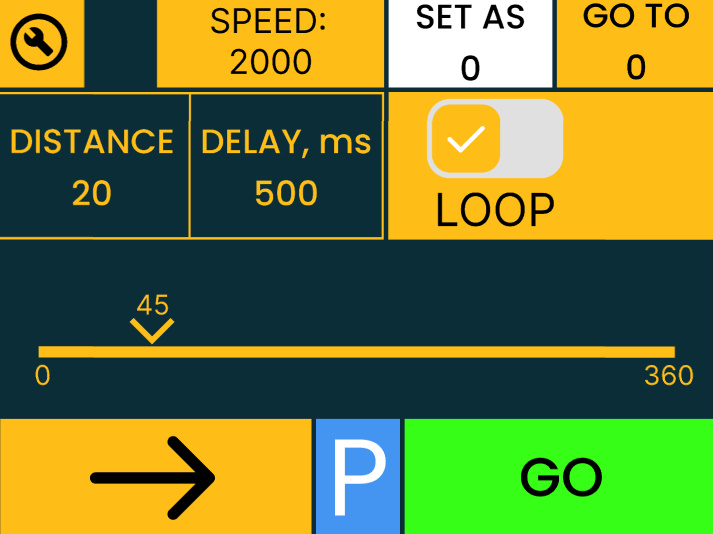
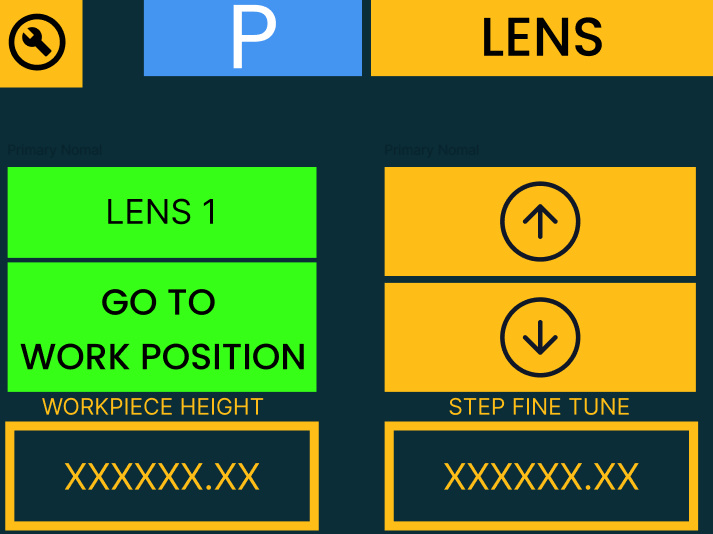
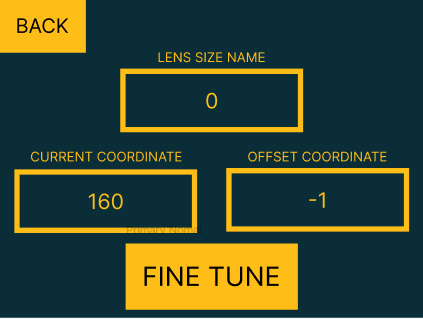
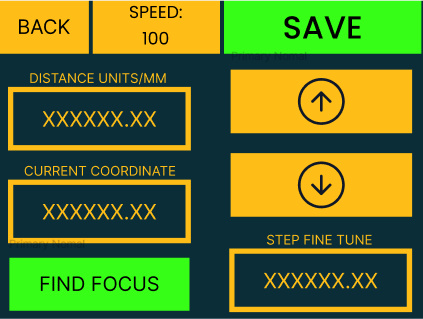
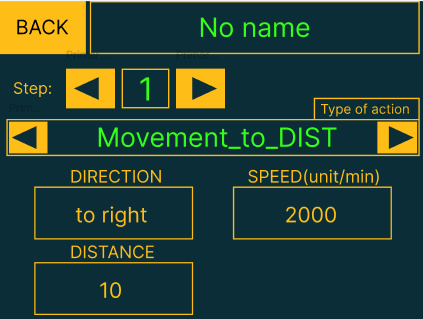
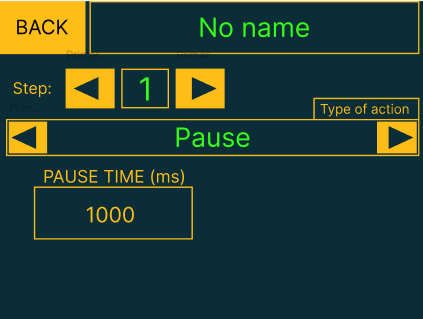
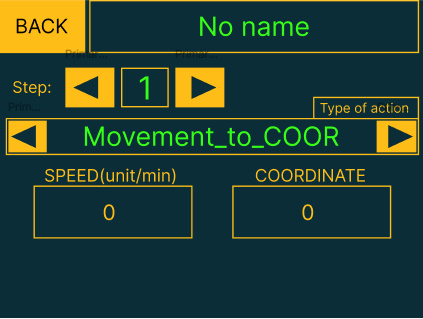
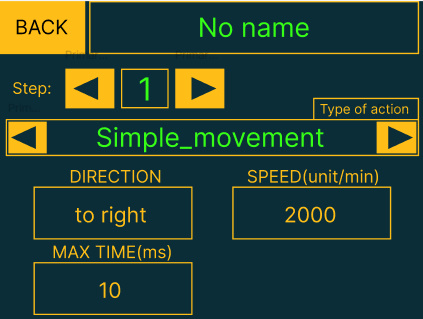
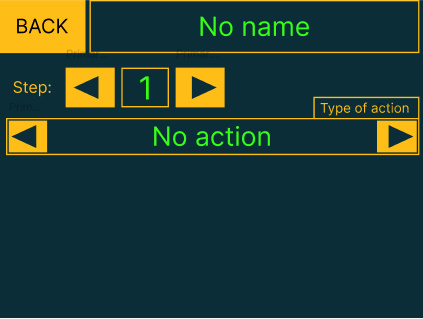
The controller features a large and intuitive touch screen interface, designed with the user in mind. The interface provides easy access to all motor control functions and configuration options. The touch screen display allows for precise control over motor movement, with real-time feedback on motor speed, position, and direction. The interface is easy to navigate, with clearly labeled buttons and icons, making it easy to set up and configure the controller for any motor application. Whether you are a beginner or an experienced user, our user-friendly interface makes controlling your motor a breeze.
The Axis Controller UPAN is designed to be both compact and durable, making it a reliable solution for a wide range of motor control applications. Whether you need to control small stepper motors for your 3D printer or larger industrial servo motors, the Axis Controller UPAN is up to the task. Its rugged design means it can handle demanding environments and challenging conditions, so you can rely on it to keep your motors running smoothly and efficiently. And with its compact size, it’s easy to mount and install, even in tight spaces.
UPAN controller technical characteristics:
- UPAN stepper motor controller
- All type of Nema and Servo stepper motors
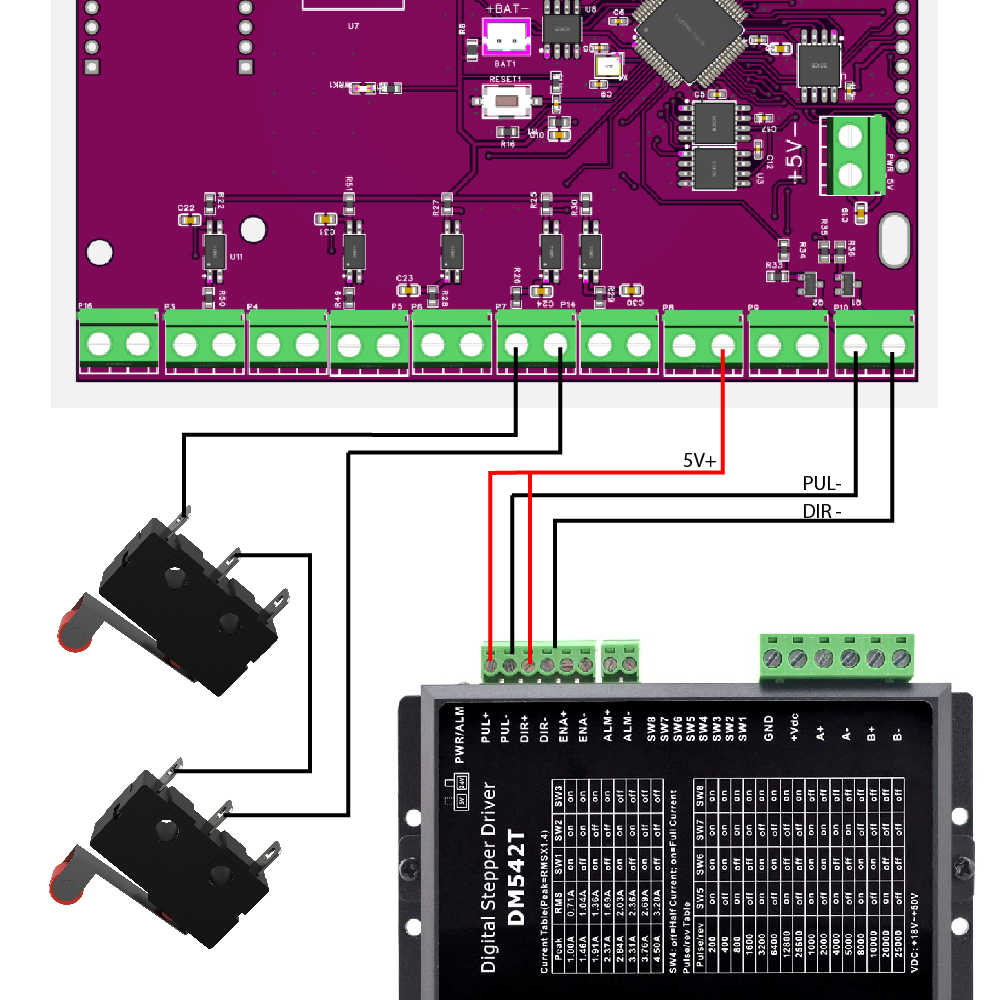
- Step/Dir signals
- Touchscreen display 3,2″
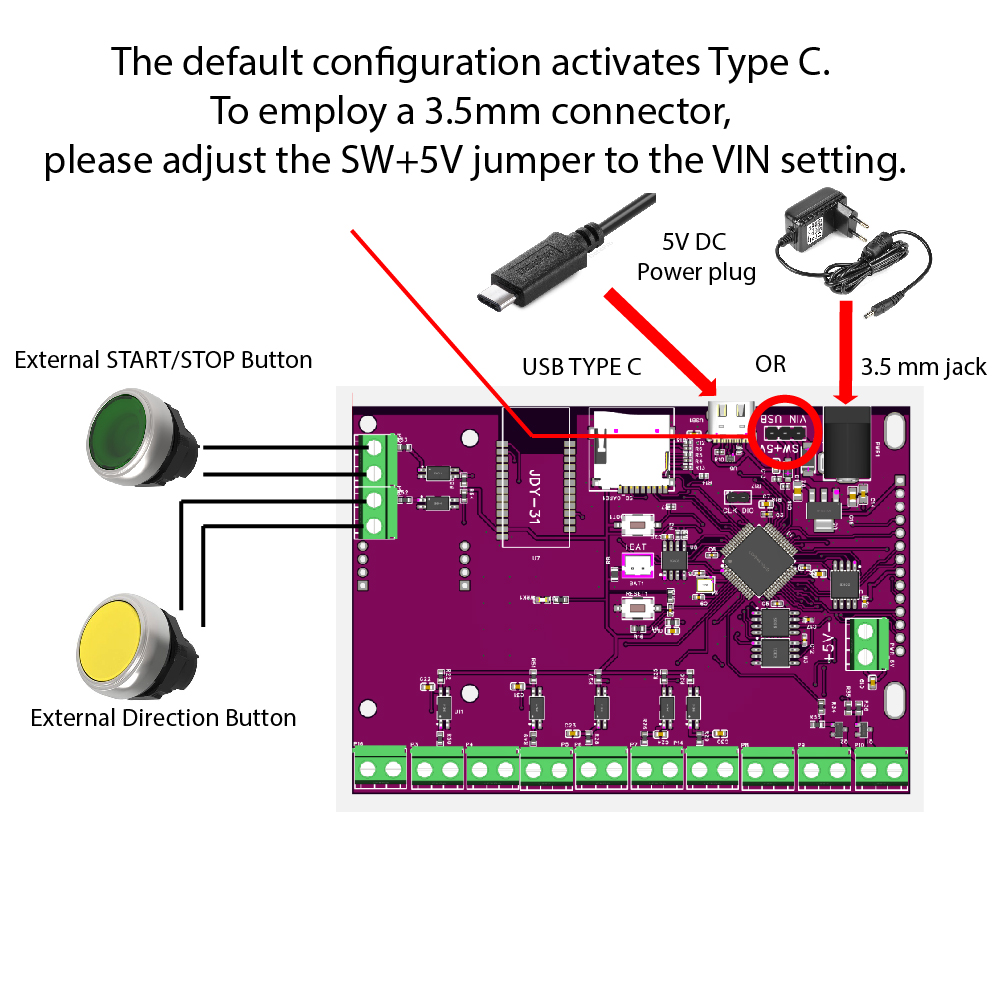
- Type C power plug 5 V
- End switch for hardware limits
- Inputs for 2 external button or triggers
- Dimensions: 113 mm(L) x 80 mm (H) x 28 mm (D)
- Weight: 190 gr
Download the 3D Model for UPAN Controller Generation 3.0
For those interested in customizing or exploring the physical dimensions of the UPAN Controller Generation 3.0, we have made a 3D model of the enclosure available for download. This model, created in Autodesk Fusion, can assist in understanding the layout and designing any necessary mounts or modifications.
Access the 3D model by following this link: Download 3D Model
Please note, the link will direct you to a resource where you can easily download the model for your use. The model provides a detailed representation of the enclosure, allowing for precise customization and integration.
How it works
Designed to control the movement of a stepper motor, whether it’s a small motor for a 3D printer or a large industrial servo motor. Equipped with a touch screen for easy control, our controller can also be connected to a PC or our own Android app via Bluetooth, allowing you to control your motor with modern technology.